EchoMimic
Talking head 动画的核心任务很简单:给定一张参考人像和一段音频,生成一段自然的口型同步说话视频。这个领域近年进展神速,SadTalker、AniPortrait、V-Express、Hallo 等一批扩散模型方法在 FID 和 FVD 指标上不断刷新记录。但一个根本性的问题一直存在:驱动信号的选择困境。#Chen-et-al.-2024-EchoMimic
纯音频驱动的方法(如 EMO、Hallo)自由度大,口型同步好,但音频信号相对较弱,导致生成的面部表情和头部姿态不稳定——同一个人说同一句话,生成两遍可能表情完全不同。纯 landmark 驱动的方法(如 Follow Your Emoji)稳定性好,可以精确控制表情和头部姿态,但过度控制导致生成结果不自然,且需要额外的 landmark 输入源。两种方法各有优劣,但彼此独立,互不兼容。
EchoMimic 的核心洞察是:为什么不能同时训练两个条件,让推理时根据需要灵活切换?它提出了一种新的训练策略——在训练时同时使用音频和 facial landmarks 作为条件,但在推理时支持三种模式:(1) 纯音频驱动、(2) 纯 landmark 驱动、(3) 音频 + 选定 landmark 联合驱动。这让用户可以在不同场景下选择不同的控制精度。#Chen-et-al.-2024-EchoMimic
纯音频驱动的局限
音频驱动的 talking head 方法(Wav2Lip、EMO、Hallo)的核心流程是:audio feature → 扩散模型 → 视频帧。音频信号虽然包含口型信息(Mel-spectrogram 或 Wav2Vec 特征),但不包含头部姿态和非口型面部表情(如眨眼、眉毛动作)。对扩散模型来说,这意味着从"弱信号"出发生成"高维输出",导致一对多映射的不确定性——同一段音频,模型可能生成不同的头部姿态和表情。这种不确定性在追求视频稳定性的产品场景中是一个严重的可靠性问题。#Chen-et-al.-2024-EchoMimic
纯 landmark 驱动的局限
另一方面,landmark 驱动的方法(如 Follow Your Emoji)用面部关键点作为控制信号,可以提供精确的几何约束。但 landmark 包含的信息量太大——它精确指定了每一帧的面部形状,实际上是在告诉模型"画成什么样",而不是"怎么动"。这就导致两个问题:一是需要额外的 landmark 来源(如从另一段视频中提取),增加了使用门槛;二是过强的控制会抑制模型的表现力,生成的视频可能看起来僵硬、不自然。#Chen-et-al.-2024-EchoMimic
| 驱动方式 | 代表方法 | 优点 | 缺点 | EchoMimic 的回应 |
|---|---|---|---|---|
| 纯音频 | EMO, Hallo, V-Express | 口型同步好,输入简单 | 姿态/表情不稳定 | 训练时加入 landmark,增强稳定性 |
| 纯 landmark | Follow Your Emoji | 精确控制,稳定 | 需要额外输入,不自然 | 训练时加入音频,保留自然度 |
| EchoMimic | 本文 | 三种模式灵活切换 | 训练成本高(两阶段) | — |
EchoMimic 基于 Stable Diffusion (SDv1.5) 构建,核心是一个 Denoising U-Net + 三个条件编码器(Reference U-Net、Audio Encoder、Landmark Encoder)+ Temporal-Attention 层。整体架构如图 2 所示。#Chen-et-al.-2024-EchoMimic
flowchart TD A["Reference Image"] --> B["VAE Encoder 🔒"] B --> C["Reference U-Net 🔥"] C -->|"K, V"| D["Reference-Attention Layer"] E["Driving Audio"] --> F["Audio Encoder 🔒"] F -->|"Cross-Attention"| G["Audio-Attention Layer"] H["Landmark Image"] --> I["Landmark Encoder 🔥"] I -->|"Element-wise Add"| J["Noisy Latent"] J --> D D --> G G --> K["Temporal-Attention Layer 🔥"] K --> L["VAE Decoder 🔒"] L --> M["Generated Video Frames"]
Denoising U-Net:三层注意力各司其职
Denoising U-Net 是 EchoMimic 的核心去噪网络,基于 SDv1.5 的 UNet 架构,每个 Transformer block 中增加了三个注意力层:
Reference-Attention:当前帧的 query 对 Reference U-Net 编码的参考图像特征做交叉注意力,作用是保持人脸身份一致性和背景一致性。Reference U-Net 与 Denoising U-Net 结构相同、并行运行,但只做一次前向传播(不参与去噪),且输入空文本占位符,确保只编码视觉信息。#Chen-et-al.-2024-EchoMimic
Audio-Attention:在 Reference-Attention 的输出上,对 Wav2Vec 音频特征做交叉注意力,将语音信息注入生成过程。音频特征来自预训练 Wav2Vec 模型,每帧拼接相邻帧的特征以捕捉时序上下文。论文强调了一个重要细节:Wav2Vec 是冻结的(🔒),不参与训练,这保持了预训练语音表征的稳定性。#Chen-et-al.-2024-EchoMimic
Temporal-Attention:沿时间轴做 self-attention,将 hidden state 从 \( (b, f, d, h, w) \) reshape 为 \( (b \times h \times w, f, d) \),在时间维度上建模帧间依赖。这是第二阶段训练才加入的,第一阶段只训练单帧。#Chen-et-al.-2024-EchoMimic
Landmark Encoder:轻量卷积融入空间信息
Landmark Encoder 是一个轻量卷积网络,将每帧的 facial landmark 图像编码为与 latent 空间维度一致的 feature map,然后通过 element-wise addition 直接加到 noisy latent 上。这种简单的加法设计利用了 landmark 图像与目标帧之间天然的空间对应关系——landmark 的每个像素位置直接对应生成帧的同一位置,不需要复杂的交叉注意力。#Chen-et-al.-2024-EchoMimic
Spatial Loss:直击像素空间的监督信号
EchoMimic 提出了一个关键的训练技巧——timestep-aware spatial loss。标准扩散模型只在 latent 空间计算 loss,但 latent 空间分辨率太低(\( 64 \times 64 \) for \( 512 \times 512 \)),难以捕捉面部细节。Spatial loss 将预测的 latent 解码回像素空间,计算 L2 + LPIPS 损失:
\( w(t) \) 是一个 timestep-aware 权重函数:当 \( t \) 较大(接近纯噪声)时,预测的 \( \hat{x}_0 \) 质量很差,强行计算像素空间 loss 会干扰训练。\( w(t) \) 在 \( t \) 大时接近于 0,\( t \) 小时接近于 1,自然地减弱早期步骤的 spatial loss 权重。总目标函数为:\( \mathcal{L} = \mathcal{L}_{latent} + \lambda \mathcal{L}_{spatial} \)。#Chen-et-al.-2024-EchoMimic
两阶段训练策略
EchoMimic 采用两阶段训练,这是基于扩散模型的视频生成方法的标准做法:
| 阶段 | 训练数据 | 训练内容 | Temporal-Attention | 步数 |
|---|---|---|---|---|
| Stage 1 | 单帧图像 | Reference U-Net + Denoising U-Net(图像-音频、图像-姿态关系) | 不插入 | 30,000 |
| Stage 2 | 12 帧视频片段 | Temporal-Attention 层(帧间时序建模) | 插入,其他部分冻结 | 30,000 |
Stage 1 让模型学会基本的图像-音频和图像-姿态关联,Stage 2 才加入时序建模。这种"先学单帧、再学时序"的策略在 Animate Anyone、EMO 等方法中也有使用,是视频扩散模型训练的经验法则。Stage 2 只有 Temporal-Attention 层被训练,其他所有参数(Reference U-Net、Audio Encoder、VAE 等)全部冻结,大幅减少了训练成本。#Chen-et-al.-2024-EchoMimic
Random Landmark Selection(RLS):核心训练技巧
RLS 是 EchoMimic 实现"三种驱动模式"的关键。训练时,将人脸分为多个区域(眉毛、眼睛、瞳孔、鼻子、嘴巴),随机丢弃一个或多个区域的 landmark。这让模型学会了:
- 当所有 landmark 都在时 → 纯 landmark 驱动
- 当所有 landmark 都被丢弃时 → 纯音频驱动(因为只剩音频信号)
- 当部分 landmark 被丢弃时 → 音频 + 选定 landmark 联合驱动
这个技巧的巧妙之处在于:不需要三种独立的训练任务,一个统一训练过程 + RLS 数据增强,就能让模型同时学会三种模式。#Chen-et-al.-2024-EchoMimic

Audio Augmentation:给音频加噪声
另一个关键训练技巧是 Audio Augmentation——对原始音频添加噪声和扰动,类似于图像数据增强。论文发现这个技巧对生成质量有显著提升,因为它让模型学会在音频质量不佳时也能稳定生成。#Chen-et-al.-2024-EchoMimic
训练配置
| 项目 | 配置 | 披露状态 |
|---|---|---|
| GPU | 8 × NVIDIA A100 | 论文披露 |
| Batch size | 4 | 论文披露 |
| 训练步数 | Stage 1: 30,000 · Stage 2: 30,000 | 论文披露 |
| 学习率 | \( 1 \times 10^{-5} \) | 论文披露 |
| 分辨率 | \( 512 \times 512 \) | 论文披露 |
| Stage 2 帧数 | 14 帧/迭代(前 2 帧为真实帧) | 论文披露 |
| Motion Module 初始化 | Animatediff 预训练权重 | 论文披露 |
| 随机丢弃概率 | 5%(参考图像、音频、motion 帧) | 论文披露 |
| 训练数据 | ~540h 网络收集 + HDTF + CelebV-HQ(~130K clips) | 论文披露 |
| 优化器 | 未披露 | 需显式标注 |
| 训练时间 | 未披露 | 论文与 README 未说明 |
| CPU / RAM | 未披露 | 论文未说明 |
数据量方面,EchoMimic 自建了约 540 小时的 talking head 视频数据集(约 130,000 个 clip,每个约 15 秒),加上 HDTF 和 CelebV-HQ 两个公开数据集。数据清洗标准严格:只保留单人说话、口型与音频强相关、无场景切换、无剧烈镜头运动、无过度表情动作、非全侧脸的片段。Landmark 使用 MediaPipe 提取。#Chen-et-al.-2024-EchoMimic
三种驱动模式
EchoMimic 在推理时支持三种模式,用户可以根据场景需求灵活选择:
| 模式 | 输入 | FID↓ | FVD↓ | SSIM↑ | E-FID↓ | 适用场景 |
|---|---|---|---|---|---|---|
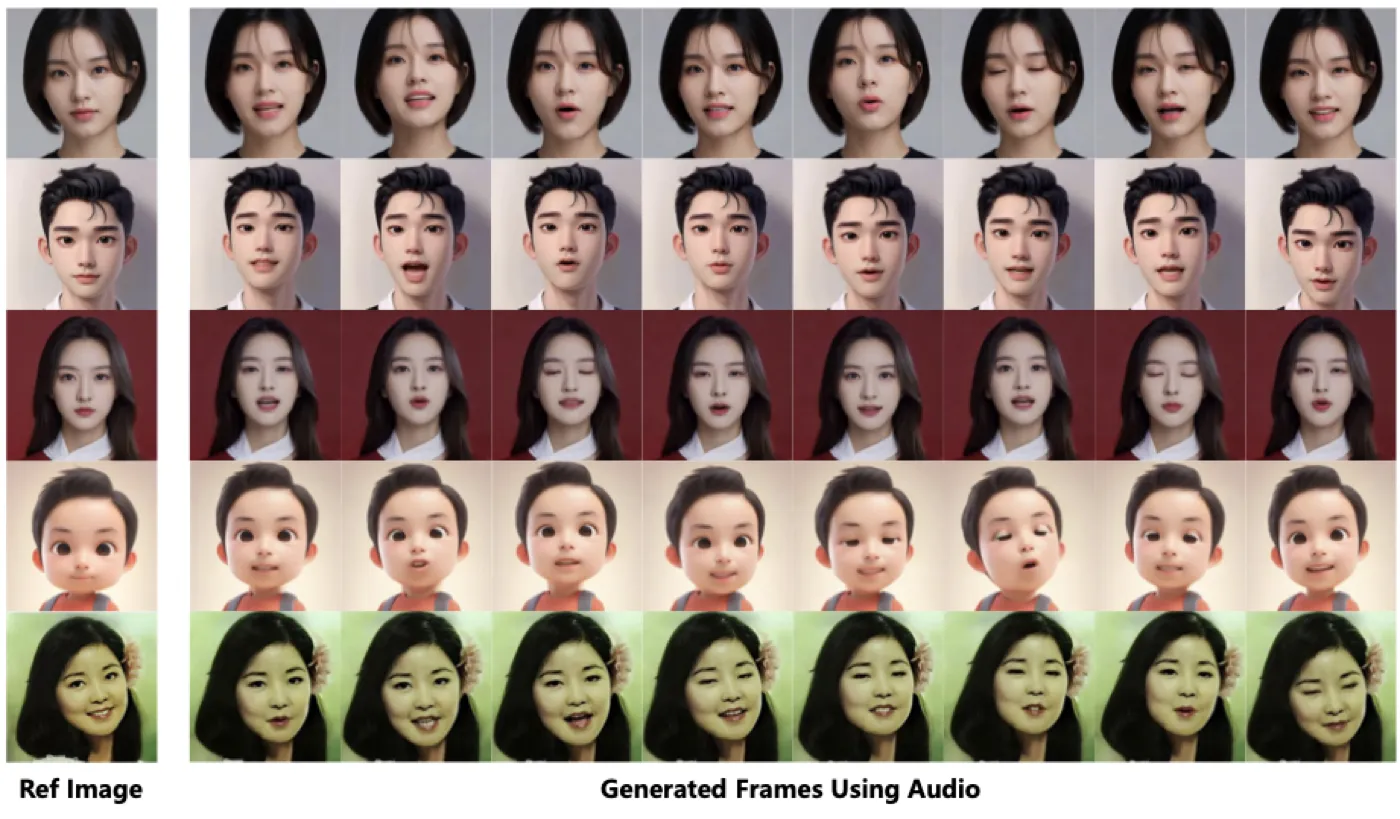
| 纯音频 (A) | 参考图 + 音频 | 29.136 | 492.784 | 0.812 | 1.112 | 说话视频生成,无需额外控制 |
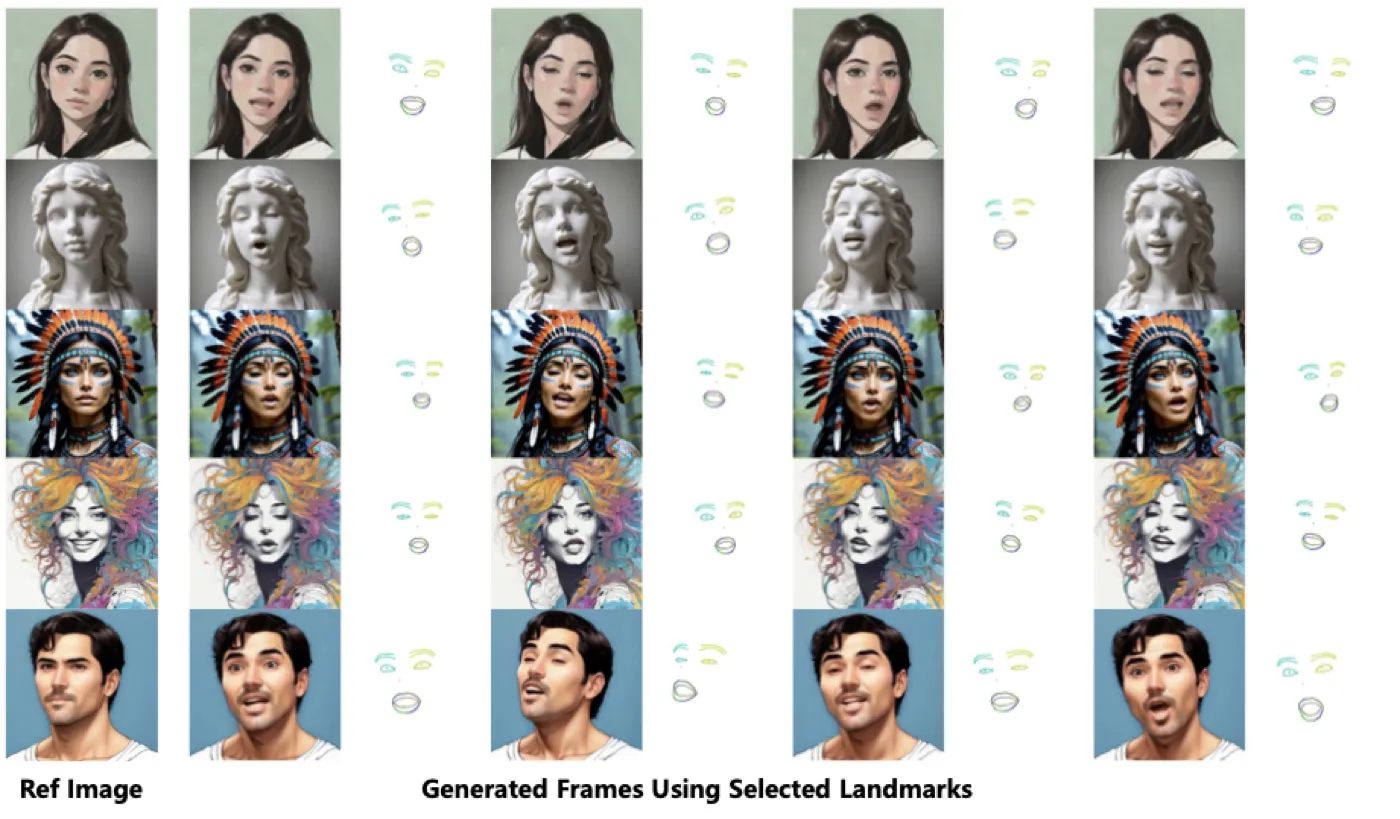
| 纯 landmark (L) | 参考图 + landmark | 22.970 | 156.537 | 0.889 | 1.057 | 表情迁移、精确控制 |
| 音频 + 选定 landmark (A+L) | 参考图 + 音频 + 部分 landmark | 22.981 | 181.741 | 0.885 | 1.093 | 需要口型同步 + 特定表情(如闭眼唱歌) |
消融实验显示,纯 landmark 驱动在 FID/FVD/SSIM/E-FID 四项指标上全部最好,因为 landmark 提供了最强的约束,生成结果最接近原始视频。但这也意味着纯 landmark 模式的"自由度"最低——它几乎是在复制 landmark 视频的动作。纯音频驱动自由度最大,但指标稍差。A+L 模式是两者之间的折中方案。#Chen-et-al.-2024-EchoMimic
Part-aware Motion Synchronization
在 landmark 驱动模式下,一个关键问题是:如何将驱动视频的 landmark 对齐到参考图像的面部?已有的方法通常做全脸透视变换(perspective warp affine),但忽略了面部各部分的独立匹配。例如,参考图像的嘴巴较小,而驱动视频的嘴巴较大,全脸变换无法很好地处理这种局部差异。
EchoMimic 提出了 Part-aware Motion Synchronization:将人脸分为多个区域,先计算全脸变换矩阵,再对每个区域计算额外的残差变换矩阵,两者结合得到最终变换。这个设计让 landmark 映射更精确地适应参考图像的面部形状——例如,在"土豆先生"的例子中,它可以正确地将参考图像的小嘴映射到驱动视频的大嘴位置。#Chen-et-al.-2024-EchoMimic

实验配置
| 项目 | 配置 | 披露状态 |
|---|---|---|
| 训练数据 | ~540h 自建 + HDTF + CelebV-HQ | 论文披露 |
| 训练 GPU | 8 × A100 | 论文披露 |
| 推理 GPU | 未披露 | 需显式标注 |
| 评估指标 | FID, FVD, SSIM, E-FID | 论文披露 |
| Baseline | SadTalker, AniPortrait, V-Express, Hallo | 论文披露 |
| 数据分割 | 90/10 identity split | 论文披露 |
| 随机丢弃概率 | 5% | 论文披露 |
HDTF 数据集主实验
| 方法 | FID↓ | FVD↓ | SSIM↑ | E-FID↓ |
|---|---|---|---|---|
| SadTalker | 41.535 | 1138.056 | 0.790 | 2.248 |
| AniPortrait | 53.143 | 1038.239 | 0.751 | 1.939 |
| V-Express | 58.230 | 1184.203 | 0.724 | 1.807 |
| Hallo | 37.659 | 501.074 | 0.781 | 1.525 |
| EchoMimic | 29.136 | 492.784 | 0.812 | 1.112 |
在 HDTF 上,EchoMimic 四项指标全面碾压所有 baseline。FID 29.136 比 Hallo 的 37.659 低 8.5 点,FVD 492.784 比 Hallo 的 501.074 低约 8 点。SSIM 0.812(结构相似度最高)和 E-FID 1.112(表情分布最接近真实)说明 EchoMimic 在保持身份一致性和表情自然度上都有明显优势。#Chen-et-al.-2024-EchoMimic
自建数据集结果
| 方法 | FID↓ | FVD↓ | SSIM↑ | E-FID↓ |
|---|---|---|---|---|
| SadTalker | 64.633 | 1681.836 | 0.699 | 2.150 |
| AniPortrait | 66.884 | 2054.527 | 0.665 | 2.312 |
| V-Express | 62.721 | 2103.213 | 0.658 | 1.689 |
| Hallo | 50.474 | 1405.215 | 0.690 | 1.452 |
| EchoMimic | 43.272 | 988.144 | 0.691 | 1.421 |
在自建数据集上,EchoMimic 的 FID 从 Hallo 的 50.474 降到 43.272(↓14.3%),FVD 从 1405.215 降到 988.144(↓29.7%),进步幅度显著。SSIM 与 SadTalker 持平,说明 EchoMimic 的结构保持能力与最优方法一致。E-FID 1.421 是所有方法中最低的,说明表情分布最接近真实数据。#Chen-et-al.-2024-EchoMimic
CelebV-HQ 结果
在 CelebV-HQ 上,所有方法的指标都因视频质量较低而整体下降,但 EchoMimic 仍取得 FID 63.258(最低)和 E-FID 2.723(最低),FVD 1115.857 略逊于 Hallo 的 1073.718。这说明 EchoMimic 在低质量数据上的时序一致性仍有提升空间。#Chen-et-al.-2024-EchoMimic
EchoMimic 的贡献可以概括为三个层次。第一层是多模式统一:通过 RLS 训练策略,一个模型同时支持三种驱动模式,用户可以根据场景自由选择控制精度。第二层是训练技巧组合:Spatial Loss(像素空间监督)+ Audio Augmentation(音频增强)+ RLS(随机 landmark 丢弃),三个技巧环环相扣,共同贡献了领先的实验指标。第三层是工程完整性:自建 540h 数据集 + 两阶段训练 + 开源代码 + 项目页面,系统性非常完整。#Chen-et-al.-2024-EchoMimic
| 方法 | 核心驱动 | 强项 | 局限 |
|---|---|---|---|
| SadTalker | 3DMM 系数 | 3D 感知,风格化 | 依赖 3D 模型精度 |
| Hallo | 音频 | 层次化控制,表情多样性好 | 单一驱动模式 |
| AniPortrait | 音频 → 3D → 2D landmark | 结构清晰,可控性好 | 级联误差累积 |
| EchoMimic | 音频 + Landmark(可切换) | 三模式灵活切换,指标全面领先 | 非真正视频框架,暂无实时加速 |
局限与未来方向
EchoMimic 有几个值得注意的局限。第一,并非真正的视频处理框架——论文坦诚承认,当前架构本质上是 SD 图像处理方法扩展到视频域,没有使用 3D VAE 或 DiT 等真正的视频生成架构。第二,暂无实时推理能力——论文提到可以用 LCM 等加速技术实现实时生成,但当前版本不支持。第三,训练配置未完全披露——优化器类型、训练时间等关键信息缺失,对复现不友好。第四,未开源模型权重——GitHub 仓库存在但无法访问,可能已被重命名或设为私有。#Chen-et-al.-2024-EchoMimic
对数字人实习的启发
EchoMimic 的 Random Landmark Selection 训练策略值得重点关注。它的核心思想是"训练时随机丢弃条件,推理时就能灵活切换"——这个思路可以推广到其他多模态条件生成任务中。例如,在 SentiAvatar 的框架中,如果训练时随机丢弃 action label 或 audio token,模型在推理时就能更灵活地处理缺失条件的情况。另一个值得借鉴的是 Spatial Loss 的 timestep-aware 权重设计——在扩散模型训练中,不同 timestep 的预测质量差异巨大,统一权重反而不如自适应权重合理。
参考文献与来源
- Chen, Z., Cao, J., Chen, Z., Li, Y., & Ma, C. (2024). EchoMimic: Lifelike Audio-Driven Portrait Animations through Editable Landmark Conditions. arXiv:2407.08136. arXiv:2407.08136
- EchoMimic Project Page. badtobest.github.io/echomimic.html
- EchoMimic GitHub Repository. github.com/BadToBest/EchoMimic
- Tian, L., et al. (2024). EMO: Emote Portrait Alive — Generating Expressive Portrait Videos with Audio2Video Diffusion Model under Weak Conditions. arXiv:2402.17485.
- Xu, M., et al. (2024). Hallo: Hierarchical Audio-Driven Visual Synthesis for Portrait Image Animation. arXiv:2406.08801.
- Zhang, W., et al. (2023). SadTalker: Learning Realistic 3D Motion Coefficients for Stylized Audio-Driven Single Image Talking Face Animation. CVPR 2023.
- Wei, H., et al. (2024). AniPortrait: Audio-Driven Synthesis of Photorealistic Portrait Animation. arXiv:2403.17694.
- Wang, C., et al. (2024). V-Express: Conditional Dropout for Progressive Training of Portrait Video Generation. arXiv:2406.02511.
- Ma, Y., et al. (2024). Follow-Your-Emoji: Fine-Controllable and Expressive Freestyle Portrait Animation. arXiv:2406.01900.